Rapid
Das Fahrzeug Rapid (Raspberry Pi drive) habe ich diesen Sommer gebaut. Die Hauptkomponenten sind ein Raspberry Pi 2, eine L298-Brücke (zum Ansteuern der Motoren), zwei Getriebemotoren und ein 7,2 V RC-Akku. Das Gehäuse ist eine einfache Tupperbox (aus der Brockenstube). In einem ersten Schritt habe ich das Fahrzeug so gebaut, dass man es entweder über WLAN oder Bluetooth fernsteuern kann. In der nächsten Zeit werde ich daran arbeiten, dass der Rapid durch eine Kamera die Steuerung selber übernehmen kann.

Funktionsweise
Das Fahrzeug ist folgendermassen aufgebaut: Die L298-Brücke versorgt die Motoren mit der für die Drehrichtung und -geschwindigkeit erforderlichen Spannung bzw. Leistung. Gespiesen wird sie selber vom RC-Akku (befindet sich unten im Rapid), die Befehle erhält sie vom Raspberry Pi (über die GPIO-Pins). Der Rapid kann nur über die Drehgeschwindigkeit der Räder gesteuert werden, da man die Achsen nicht bewegen kann. Der technische Begriff dazu lautet Pulse Width Modulation (PWM). Soll das Fahrzeug beispielsweise eine Linkskurve vollführen, so sendet der Raspberry Pi über die Pins die Information, dass die Räder rechts schneller drehen sollen als diejenigen links. Im Extremfall (um sich auf der Stelle zu drehen) kann man sogar die linken Räder rückwärts drehen lassen. Die Fernsteuerung funktioniert entweder über WLAN (SSH-Verbindung mit dem Raspberry Pi) oder Bluetooth (da Wii-Vernbedienungen über Bluetooth kommunizieren, kann man eine solche verwenden).
Video
Das folgende Video zeigt den Startprozess und die Fernsteuerung des Rapid:
Arbeitsschritte
Zuerst erfolgte das Zusammenbauen der einzelnen Komponenten. Die Motoren erhielt ich als Bauset. Leider waren die mitgelieferten Achsenstäbe zu kurz für die Tupperbox, deshalb musste ich noch längere nachbestellen. Den Raspberry Pi habe ich mit dem System Raspbian in Betrieb genommen (gute Anleitungen dazu gibt es auf raspberrypi.org).
Als nächsten Schritt baute ich die Komponenten in die Tupperbox ein. Die L298-Brücke habe ich etwas erhöht, damit mehr Luft durchströmen kann und das Bauteil nicht überhitzt. Die Räder sind mit Madenschrauben an den Motorachsen fixiert. Die beiden Motoren habe ich an der Unterseite der Tupperbox festgeschraubt. Nicht definitiv fixiert habe ich den Raspberry Pi, damit er noch aus der Box herausgenommen und an einen Bildschirm angeschlossen werden kann.
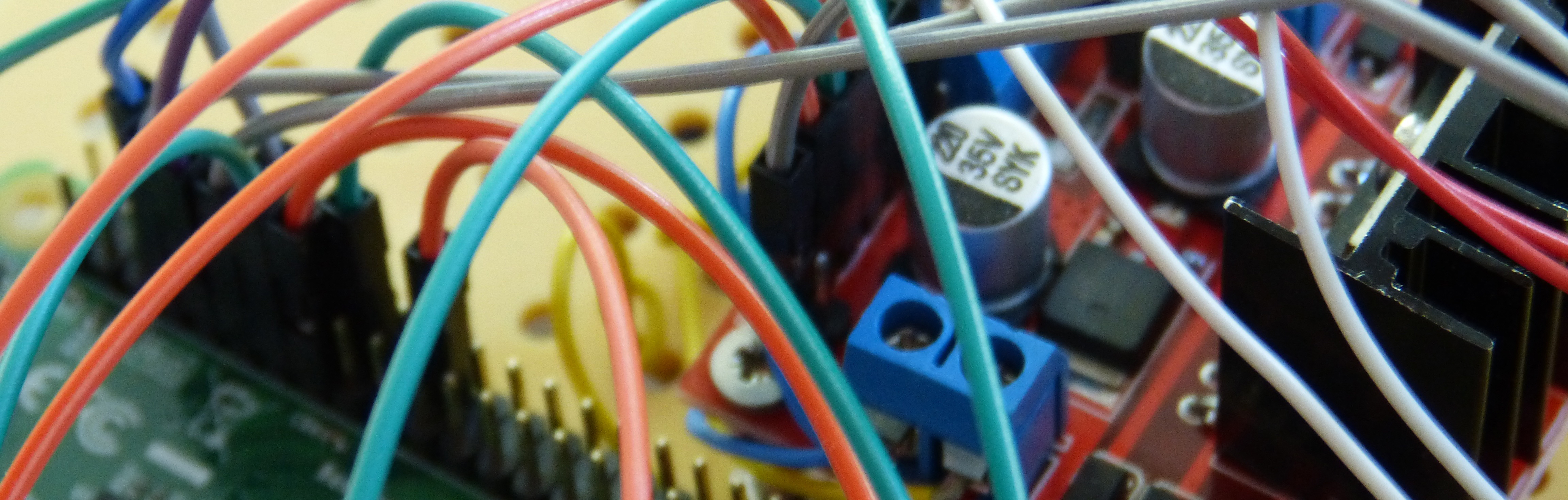
Der dritte Schritt bestand aus der Verkabelung. Hier muss sehr vorsichtig vorgegangen werden, da Fehler nicht verziehen werden und durchaus in einem kaputten Raspberry Pi enden können (was bei mir unglücklicherweise geschah). Im zweiten Anlauf hat es dann aber funktioniert.
Während dem letzten Schritt musste der Raspberry Pi noch programmiert werden, damit er auf Benutzereingaben reagieren und das Fahrzeug steuern kann. Ich habe dazu extra die Programmiersprache Python gelernt. Mit ihrer raffinierten Einfachheit passt sie sehr gut zum Raspberry Pi. Damit war der Bau des Rapid abgeschlossen.
Quellen
Quelle Bilder: Luc Schnell
Quelle Video: Luc Schnell (auf Youtube)