
Das Fahrzeug Rapid kann nun Objekte anhand ihrer Farbe erkennen. Dazu wird der Rapid vor ein gewünschtes Objekt gestellt und das Selbststeuerungs-Programm gestartet. Der eingebaute Raspberry Pi 2 schiesst nun über das Kamera-Modul ein Foto und liest die Pixelfarben von Hundert Pixeln (ein 10×10-Quadrat) in der Mitte des Bildes aus. Dann berechnet er die durchschnittliche Farbe (den RGB-Wert) dieser Hundert Pixel. Diese Farbe wird in der Folge als gesuchte Farbe bezeichnet.


Anhand der gesuchten Farbe werden nun Objekte verglichen. Der Rapid schiesst laufend weitere Fotos, erkennt Objekte ähnlicher Farbe und steuert auf sie zu. Als “ähnlich” gilt eine Farbe, wenn alle ihre RGB-Werte nicht mehr als ± 20 von der gesuchten Farbe abweichen.
Suche
Unten ist ein aufgenommenes Foto des Rapid zu sehen. Darunter sieht man das gleiche Foto nach der Bildauswertung. Bereiche, die eine ähnliche Farbe wie die gesuchte Farbe aufweisen, sind weiss eingezeichnet, alle anderen schwarz. Der Schwerpunkt der weissen Bereiche ist mit dem grün-gelben Quadrat gekennzeichnet. Die Farbe dieses Quadrates stellt die gesuchte Farbe dar. Da sich der Schwerpunkt ungefähr in der Mitte des Bildes befindet, fährt der Rapid nun geradeaus.

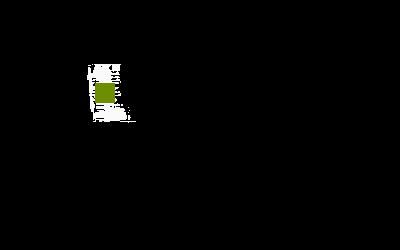
Hier ist ein weiteres Bild-Paar zu sehen. Wiederum zeichnet der Rapid die Bereiche mit Ähnlichkeit zur gesuchten Farbe weiss, der Schwerpunkt wird mit dem gelb-grünen Quadrat angezeigt. Da sich der Schwerpunkt nun eher rechts im Bild befindet, steuert der Rapid leicht nach rechts.


Wird nirgends auf dem Bild eine ähnliche Farbe zur gesuchten Farbe gefunden (im unteren Bild sind keine weissen Bereiche zu sehen), so führt der Rapid eine Linksdrehung aus, um zu sehen, ob sich irgendwo sonst im Raum noch ein gesuchtes Objekt befindet.

Video
Auf folgendem Video ist die ganze Suche zu sehen:
Quellen
Quelle Bilder: Luc Schnell
Quelle Video: Luc Schnell (auf Youtube)